A Voice Coil Motor is basically an electromagnetic transducer in which a coil placed in a magnetic pole gap experiences a force proportional to the current passing through the coil. Voice Coil Motor can be generally classified as a dc brush less motor if the coil is wound as the starter and the permanent magnet with the attached payload is allowed to move or rotate. For rotary applications, a number of types of limited travel & brush less motors are available on the market, possessing flat torque output over a region of ±20°. By providing the necessary encoding and electronics, these motors are also used as constant speed motors.
Assuming the force generated is independent of position, the governing equation can be written as
L * di/dt + R i = E - φ v
dv/dt = φ i / J v = dx/dt
where
L = inductance of the motor coil (henry);
i = current intensity through the motor coil (ampere);
R = resistance of the motor coil (ohm);
E = applied voltage to the coil (volt);
φ = transducer constant; for linear motion, its units are either
Newton/ampere or volt/meter/second, and for rotary motion, the units
are N-m/A or volt/radians/second;
v = velocity of motion (radians/second or meter/second);
J = total inertia of the motor and access mechanism (kg - m2 or kg);
x = response (radians or meter).
The Voice Coil Motor design objective is to move from point A to B in the shortest time possible.
A physical constraint may exist to limit R / φ**2 to a constant +/- a tolerance. H1 & H2 in attached code show how such a constraint may be handled. R and φ will be varied in order to find a minimal seek time, Total_t, while meeting this physical constraint.
A DC brush less motor is to be used whose coilhas an inductance of .015 H in the presence of the permanent magnet. The supply voltage is 24 V, and there is a drop of about 1 V in the electronics before the motor winding. To reduce the thermal gradient, the maximum current should be limited to 0.5 A. Obtain the voltage transition times (τ i), plus the torque sensitivity (φ) of the dc motor and the resistance (R) of the coil to meet the design objectives.
Increased ProductivityExample
#6Source Code:
1. Theoretical Problem/Solution ... Zero time for
change in polarity
Problem Seektime [Voice Coil Motor For An Actuator; Objective = Move from Point A to B in desired time (Tf)] Allot Tau(3) R = 50 Emax = 23 L = .015 [Ohms, Volts, Henry] Phi = .5 J = 5e-4 [Volts * Sec./Rad., Kg * M * M * Ohm] C = 0 V = 0 X = 0 [Initial Values] T = 0 Dt = .001 Tf = .072 [Time In Seconds] Tau(1) = .3*Tf Tau(2) =.4*Tf Tau(3) = .1*Tf Tmech = .12 Tm_tol = .05 [Mechanical Time constant & % tolerance] Pi = 4*Atan(1.) Xfinal = Pi / 6 [radians = 30 degrees of travel] Call Actuator End Model Actuator Find Tau In Bangbang By Ajax( Cntl2) To Match Err_pos, Err_vel End Controller Cntl2( Ajax) Damp = .0002 End Model Bangbang T = 0 C = 0 V = 0 X = 0 Tp = 0 [ Initial Values] For I = 1 to 3 Do Total_t = Tp + Tau( i) Dt = Tau( i)/100 Dp = 5 * Dt Tp = Tp + Dp Initiate Isis For VCMotor Equations Cdot/C, Vdot/V, Xdot/X of T Step Dt To Tp Polarity = -(-1)**I E = Emax * Polarity Do While (Tp .le. Total_t) then Tp = Tp + Dp Integrate VCMotor By Isis Print T, V, Vdot End Do Repeat Err_pos = Xfinal - X Err_vel = V End Model VCMotor Vdot = Phi * C / J Xdot = V Cdot = (E - Phi * V - R * C) / L End
2. Theoretical Problem/Solution ... Zero time for
change in polarity
New objective: Minimize Seek Time
Problem Seektime [Voice Coil Motor For An Actuator Objective = Minimize Seek Time] Allot Tau(3) R = 50 Emax = 23 L = .015 [Ohms, Volts, Henry] o o (same code as in example 1) o Pi = 4*Atan(1.) Xfinal = Pi / 6 [radians = 30 degrees of travel] Find Phi, R In Actuator By Jupiter( Cntl1) Holding H1, H2, Hc To Minimize Total_t End Model Actuator H1 = - R * J + Tmech * (1+Tm_tol) * Phi**2 [H1 & H2 must be >= 0] H2 = R * J - Tmech * (1-Tm_tol) * Phi**2 Find Tau In Bangbang By Ajax( Cntl2) To Match Err_pos, Err_vel End Controller Cntl1( Hera) Adjust = 2 End Controller Cntl2( Ajax) Summary = 0 End Model Bangbang T = 0 C = 0 V = 0 X = 0 Tp = 0 [ Initial Values] For I = 1 to 3 Do Total_t = Tp + Tau( i) Dt = Tau( i)/100 Dp = 5 * Dt Tp = Tp + Dp Initiate Isis For VCMotor Equations Cdot/C, Vdot/V, Xdot/X of T Step Dt To Tp Polarity = -(-1)**I E = Emax * Polarity Do While (Tp .le. Total_t) then Tp = Tp + Dp Integrate VCMotor By Isis Print T, V, Vdot End Do Repeat Terminate VCMotor Err_pos = Xfinal - X Err_vel = V End Model VCMotor Vdot = Phi * C / J Xdot = V Cdot = (E - Phi * V - R * C) / L Hc = .5 - C [ Hc must be >= 0] End
3. Practical Problem/Solution ... ArcTan() used to
change polarity
Problem Seektime [Voice Coil Motor For An Actuator Objective = Minimize Seek Time with constraint on rise/fall times; ie. |Edot| < Emax_slope] Allot Tau(3) o o (same code as in example 1) o Pi = 4*Atan(1.) Xfinal = Pi / 6 [radians = 30 degrees of travel] Ypeak = .985 * Pi/2 Xmax = Tan( Ypeak) Trise = 5*Tf/100 Pw50 = Trise Tends = .6*Trise Find Phi, R In Actuator By Jupiter( Cntl1) Holding H1, H2, Hc To Minimize Total_t End o o (same code as in example 2) o Model VCMotor Vdot = Phi * C / J Xdot = V Call Risetime [ E = constant except during transition times] Cdot = (E - Phi * V - R * C) / L Hc = .5 - C [ Hc must be >= 0] End Model Risetime If( I .Eq. 1) then [ Calculate E during transition time] If( T .lt. Tends ) then [ ie. E = f(t) during rise/fall times] E = (Atan((4*T/Pw50 - 1.)*Xmax) / Ypeak + 1.)/2. Endif Else If( I .eq. 2) then If( T-Xtau(1) .lt. Trise) then [Switch voltage polarity] Tt = T - Xtau(1) E = - Atan((2*Tt/Pw50 - 1.)*Xmax) / Ypeak Endif Else If( I .eq. 3) then If( T-Xtau(1)-Xtau(2) .lt. Trise) then [Switch voltage polarity] Tt = T-Xtau(1)-Xtau(2) E = Atan((2*Tt/Pw50 - 1.)*Xmax) / Ypeak Else If( Time-T .lt. Tends) then [Drop voltage to zero] Tt = T-Time+Tends E = - (Atan((4*Tt/Pw50 - 1.)*Xmax) / Ypeak-1.)/2 Endif Endif End
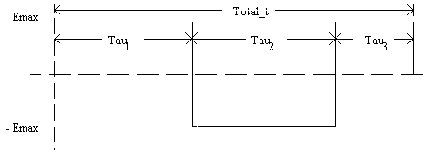
Applied Voltage waveforms to Coil
Figure 1. Theoretical Problem/Solution
... Zero time for change in polarity
Objective: Specific time (Tf) for movement; i.e. Total_t must equal Tf.
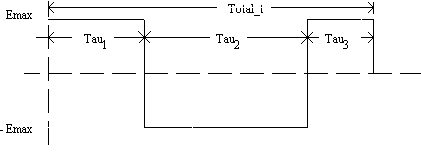
Figure 2. Theoretical Problem/Solution
... Zero time for change in polarity
Objective: Minimize Seek Time (Total_t)
Figure 3. Practical Problem/Solution
... ArcTan( ) used to change polarity
Objective: Minimize Seek Time while constraining rise/fall time.
This Voice Coil Motor problem is another increased productivity example do to using Calculus (level) programming.
[1]Ananthanarayanan, K. S., Third-Order Theory and Bang-Bang Control of Voice Coil Actuators, IEEE Trans. on Magnetics, Vol. MAG-18, No. 3, May 1, 1982, pp. 888-892.
 A
A